Giriş
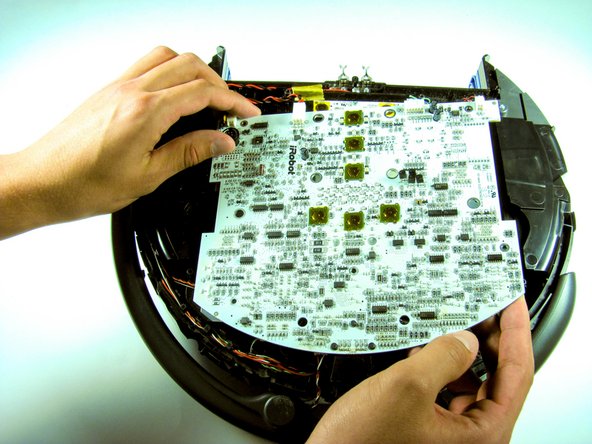
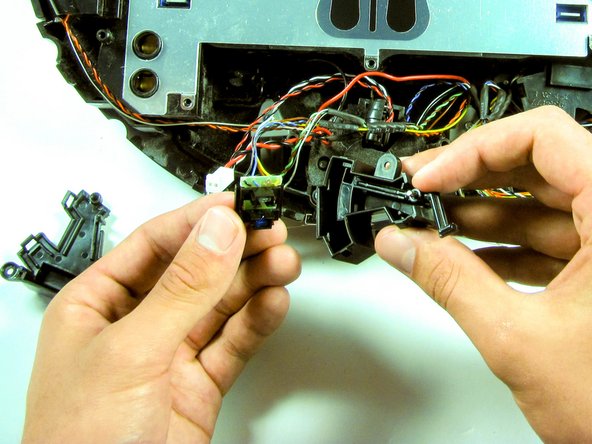
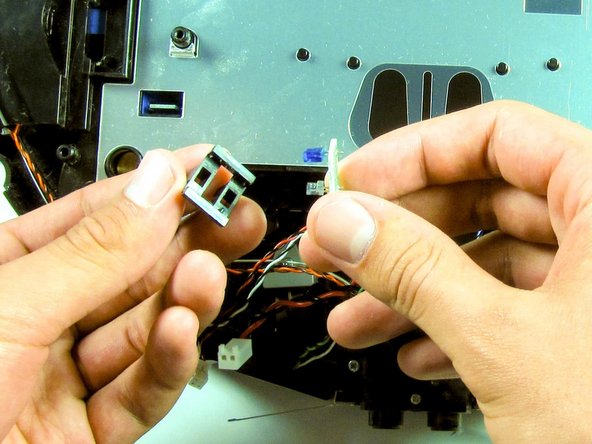
This will involve getting deep into Roomba's inner core and removing the motherboard. The IR transmitter is a small blue device housed in a black plastic casing towards the front of the Roomba. This infrared sensor helps the Roomba to locate itself and detect its surroundings.
Neye ihtiyacın var
-
-
With the Roomba upside down and turned off, use the Phillip's 02 screwdriver to remove the one 3.5 mm screw from the center of the side-brush.
-
Set the screw aside and pull the brush out.
-
-
-
Unscrew the four screws that hold the bottom panel using the Phillips 02 screwdriver.
-
Once you are sure that all the screws have been loosened as much as possible, then lift the bottom panel up off the Roomba.
-
-
-
Once the side brush and bottom panel are out of the way, simply grasp the battery by the two green flaps and pull it out.
-
-
-
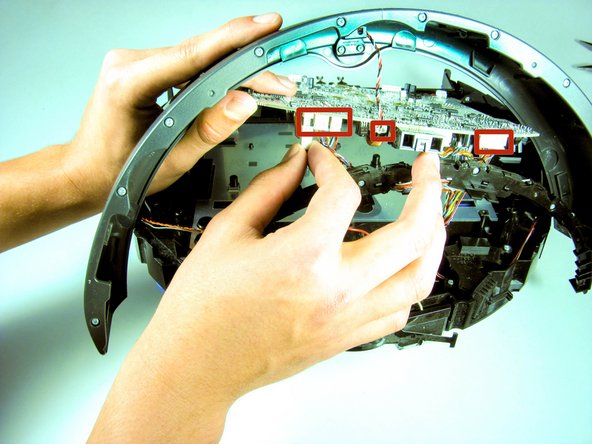
Remove the front bumper. You may remove it with your hands or a tool. It should snap off with some effort. It will still be attached to the Roomba by a couple of wires.
-
-

























































To reassemble your device, follow these instructions in reverse order.
To reassemble your device, follow these instructions in reverse order.
İptal et: Bu kılavuzu tamamlamadım.
6 farklı kişi bu kılavuzu tamamladı.
Ekip
Cal Poly, Team 19-7, Maness Winter 2015 Cal Poly, Team 19-7, Maness Winter 2015 üyesi
CPSU-MANESS-W15S19G7
4 Üyeler
6 adet Kılavuz yazıldı
Bir Yorum
Hi, I am curious about this given what my 650 is doing... It turns on and runs for 2 minutes before I get the error about cleaning the wheels. Basically, the Roomba goes in a circle to the left and that's it. Occasionally, it will back up to the right, and then go in a faster circle to the left. If I hit the bumper it will go back to the right and then forward again to the left. I replaced the left wheel and it had no impact. Do you think it's the sensor? Thanks