Giriş
A collaboration between NBC and Viget! Get a look inside Johnny Weir’s new and improved interactive brooch for the 2018 Kentucky Derby. What does it do? It’s connected to Twitter in real-time through an innovative bit of electronics. The custom brooch was engineered with onboard lights, servo (for the animatronic gallop), accelerometer, and wifi connectivity. See it come to life by tweeting at #WatchMeNeighNeigh whenever Johnny is on TV this Saturday!!
Bill of materials?
- Custom PCB
- Lights
- Servo
- Accelerometer
- Wifi module
- Battery
- 3D printed enclosure
- Paint, rhinestones, super glue
Neye ihtiyacın var
-
-
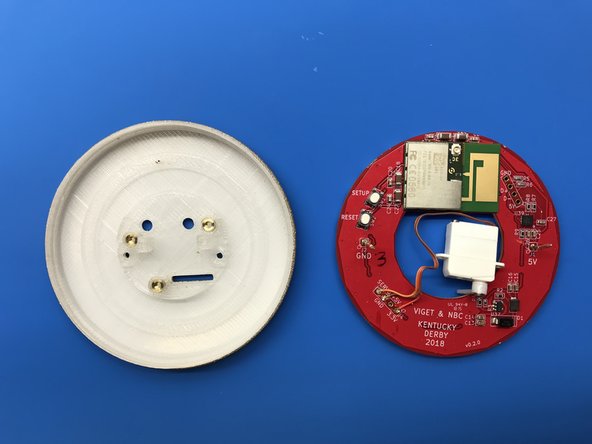
Gather all components and flip everything over.
-
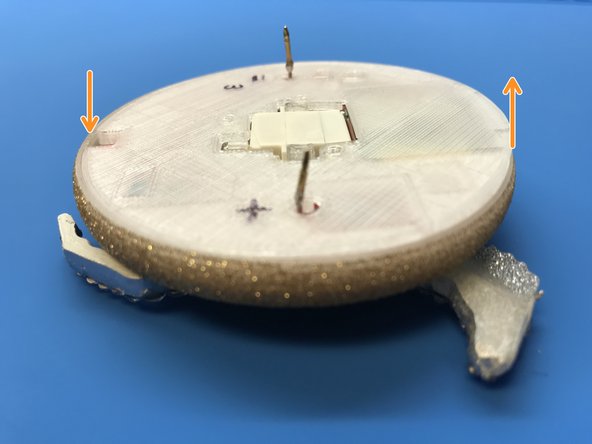
Mount the head, tail, and both legs by placing them over their pivot points.
-
-
-
Carefully align the linkage with the mounting holes on both legs.
-
Place two 3mm eyeglass screws into either end of the linkage.
-
Tighten the screws. These screws will self-tap into the legs. Be careful to not over-tighten and seize the linkage.
-
-
-
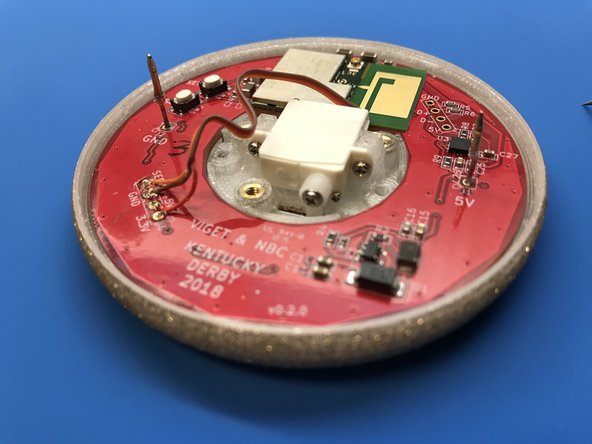
Pull the servo through the donut hole of the PCB (top to bottom).
-
Orient the servo arm to the left (aligned with the rest of the body). This represents the zero degree location.
-
Manually move the servo arm down 90 degrees so it is now points downward into the work surface.
-
Mount the servo to the enclosure.
-
-
-
-
Place the PCB overtop the servo.
-
Route the servo's wire around various components as depicted.
-
Coil extra wire in available space.
-
-
-
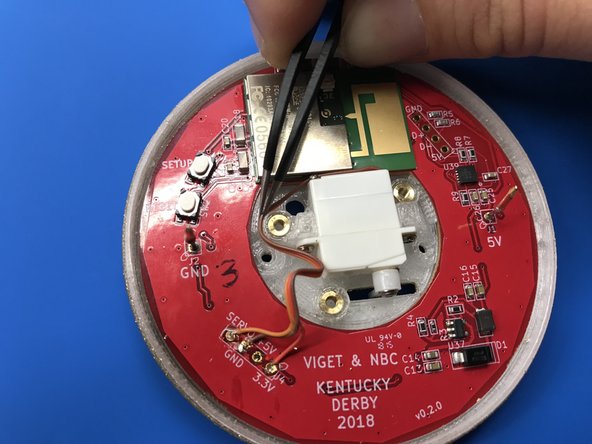
Align the enclosure with the mounting holes on the backside of the horse's body.
-
Align servo arm with the drive gap in the linkage. Double check this correct before tightening.
-
Use two M2 screws to attach the horse to the enclosure.
-
-
-
Start by placing the bottom notched-side into the lip of the enclosure.
-
Align all three mounting holes from above.
-
Press firmly with both hands (avoid putting pressure on horse) and work your hands around the edges until the back is pressed flush.
-
Secure the back of the enclosure by driving three M2 screws into place. DO NOT OVER TIGHTEN!
-
-
-
Attach wiring harness to brooch.
-
Plug wiring harness into USB power supply.
-